
机器人核心部件——精密减速器行业现状及趋势
发布时间:
2025-04-16
来源:
网络
作者:
广东永坤电机有限公司制造
现在工业机器人的自动化程度让人叹为观止,有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的,关节到底是什么结构的呢?
关节是工业机器人最重要的基础部件之一,也是运动的核心部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。
机器人关节处的减速传动,要求传动链短、体积小、功率大、质量轻和易于控制,同时,对于中高载荷的工业机器人,还需要足够的刚度、回转精度和运动精度稳定性。
减速器的工作原理及主要分类
在机械传动领域,减速器是连接动力源和执行机构之间的中间装置,主要 工作原理为通过机械传动装置实现对原动机的减速增扭,即通过齿数少的输入 轴上齿轮啮合输出轴上的大齿轮,将原动机高速运转的动力降低转速、增大输出扭矩。
因此,减速器广泛应用于低转速大扭矩的传动设备,也是影响机器人性能的核心因素。减速器种类繁多、型号各异,以实现各行业不同动力传输需求。减速器可根据多种方式进行分类。按照控制精度,减速器可分为一般传动减速器和精密减速器。
一般传动减速器控制精度低,可满足通用机械设备基本的动力传动需求;精密减速器精度高、使用寿命长、回程间隙小、可靠性高,适用于精密控 制需求高的工业机器人、服务机器人、协作机器人、工业自动化等高端制造领域。
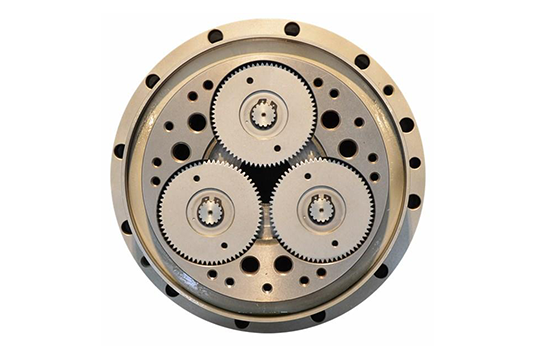
RV减速器是由一个行星减速机的前级和一个摆线针轮减速机的后级组成, 传动比大,在一定条件下具有自锁功能的传动机械。RV减速器是在传统针摆行星传动的基础上发展出来的,其减速结构由行星减速机的前级和摆线针轮减速机的后级组成,采用至少两根以上偏心轴连接二级减速机构;壳体和摆线针轮由实体的铸件、钢件进行配合传动,为一封闭差动轮系。RV减速器不仅克服了一般摆线针轮传动的缺点,还具有高精度(齿隙1角分以下)、高刚性、高耐久性、高输出密度(高力矩且紧凑)、减速比范围大和低振动等一系列优点。
电机,减速机,减速电机
相关资讯









